Roy’s collaboration with other researchers using unmanned aerial systems led to an application recently published in Agronomy. doi: 10.3390/agronomy10050633
Roy set out to make use of available low-altitude remote sensing data. Available data are often more useful than unavailable data, in practice.
Work led us to recognize that data generated through LARS are different from data generated by walking in a field with a ruler in two fundamental (that’s a pun) ways: first, LARS data aren’t calibrated in the way that ruler measurements are; second, LARS data points come in by the million at today’s image resolution, and no one with a ruler takes that many measurements. Convention is to calibrate LARS data against the ground in a way similar to how people do it with rulers: the ruler doesn’t allow you to differentiate the ground from your measurement target, so you classify plants vs. ground by another process, involving your recognition of patterns based on colors, shapes, and your heuristics. This process for LARS-based estimation can use global positioning systems, computer vision, or other things that have lots of potential.
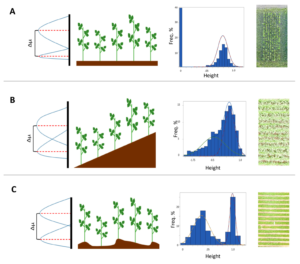
Roy asked, can we estimate plant heights accurately without calibrating LARS data against the ground through other means? Can we apply a heuristic to the data after they’re collected and estimate plant heights without knowing which distance-from-the-drone recordings are for the ground vs. the plants? The answer is yes, so long as you have data of the type and quantity provided through LARS, and that answer is detailed in his paper. Roy is also good at making schematics – here’s one that shows how images, values, and interpretations correspond in his technique: