We received good news that Manjari requires more space for her EPG work, so the group made another Faraday cage.



We received good news that Manjari requires more space for her EPG work, so the group made another Faraday cage.
Working with Aaron Tarone of Texas A&M Entomology and members of his group, we have been developing insect phenology models that account for thermoregulatory behavior. These models are intended for use in predicting vector and pest dynamics, and in retrodicting events of forensic importance that can be indicated by insect development.
We’re happy to have some of this work recently published in Frontiers in Ecology and Evolution: https://static.frontiersin.org/articles/10.3389/fevo.2022.837732/full
The rationale of this work has been that organisms capable of behavior will behave in ways that are on average beneficial. Insects have been shown to “have” what we call “preferred temperatures.” The mechanisms related to this are complex, but they don’t need to be clarified before we can improve predictions by implicitly incorporating behavior into models. Our improvement transforms distributions of environmental temperature into distributions of insect temperatures, through a function that involves environmental temperature and its variance, and insect preferred temperature. It is a simple convolution, wherein development rate is a function of insect body temperature, which is a function of environmental temperatures and insect behavior.
Here’s how it looks:
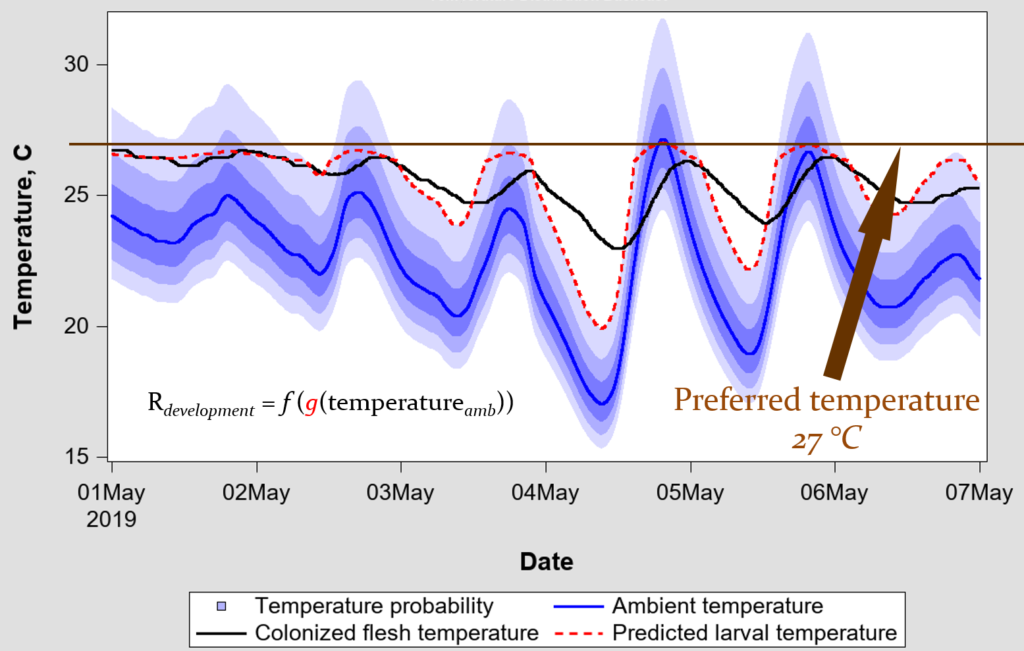
The graph shows temperatures through time: ambient air (which is what many phenology models use as input), colonized flesh (because this work was done on necrophagous fly larvae), and predicted insect temperature using our model. I’ve arbitrarily chosen 27 °C as a preferred temperature. Blue bands around the ambient temperature trace are to suggest temperature variation across space. Predicted larval temperatures lie between ambient and preferred, determined jointly by the difference between ambient and preferred and the variance around ambient.
Roy L. Davis II becomes Graduate I,

and departs from the department.

Later, Dr. Davis looks back and reflects.

Roy spent plenty of time in the laboratory quantifying Fusarium oxysporum f. sp. vasinfectum (Fov) DNA from field soil, and some of his work is now reported in a Plant Disease publication: https://doi.org/10.1094/PDIS-08-21-1664-RE
The work’s objective was to describe spatial variability in Fov inoculum density in the field, because that variation is hypothesized to affect risk of cotton plants expressing Fusarium wilt disease. Much of Roy’s report concerns development of the quantification method, which targets the Fov race affecting the selected field sites. Roy discovered that inoculum density varies across the field space by orders of magnitude (shown in the figure below, where “inoculum level” is a relative logarithmic scale), and by observing it at multiple time points he noticed a temporal pattern: inoculum density trajectory depends on growth resource type and availability, which depends on prior inoculum density. Roy is now finishing documentation of that cycle in this system.

Roy’s collaboration with other researchers using unmanned aerial systems led to an application recently published in Agronomy. doi: 10.3390/agronomy10050633
Roy set out to make use of available low-altitude remote sensing data. Available data are often more useful than unavailable data, in practice.
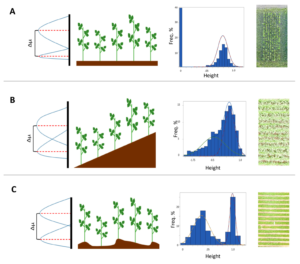
Work led us to recognize that data generated through LARS are different from data generated by walking in a field with a ruler in two fundamental (that’s a pun) ways: first, LARS data aren’t calibrated in the way that ruler measurements are; second, LARS data points come in by the million at today’s image resolution, and no one with a ruler takes that many measurements. Convention is to calibrate LARS data against the ground in a way similar to how people do it with rulers: the ruler doesn’t allow you to differentiate the ground from your measurement target, so you classify plants vs. ground by another process, involving your recognition of patterns based on colors, shapes, and your heuristics. This process for LARS-based estimation can use global positioning systems, computer vision, or other things that have lots of potential.
Roy asked, can we estimate plant heights accurately without calibrating LARS data against the ground through other means? Can we apply a heuristic to the data after they’re collected and estimate plant heights without knowing which distance-from-the-drone recordings are for the ground vs. the plants? The answer is yes, so long as you have data of the type and quantity provided through LARS, and that answer is detailed in his paper. Roy is also good at making schematics – here’s one that shows how images, values, and interpretations correspond in his technique: